Reinforcement Learning Environment¶
We now have a Reinforcement Learning Environment which uses Pybullet and OpenAI Gym! It contains a variety of optional terrains, which can be activated using heightfield=True in the environment class constructor.
If you try to launch the vanilla gait on fairly difficult terrain, Spot will fall very quickly:
 PyBullet
PyBullet
By training an Augmented Random Search agent, this can be overcome:
 PyBullet
PyBullet
If you are new to RL, I recommend you try a simpler example. Notice that if we choose non-ideal parameters for the generated gait, the robot drifts over time with a forward command:
 PyBullet
PyBullet
You should try to train a policy which outputs a yaw command to eliminate the robot’s drift, like this:
 PyBullet
PyBullet
You can choose a PNG-generated terrain:
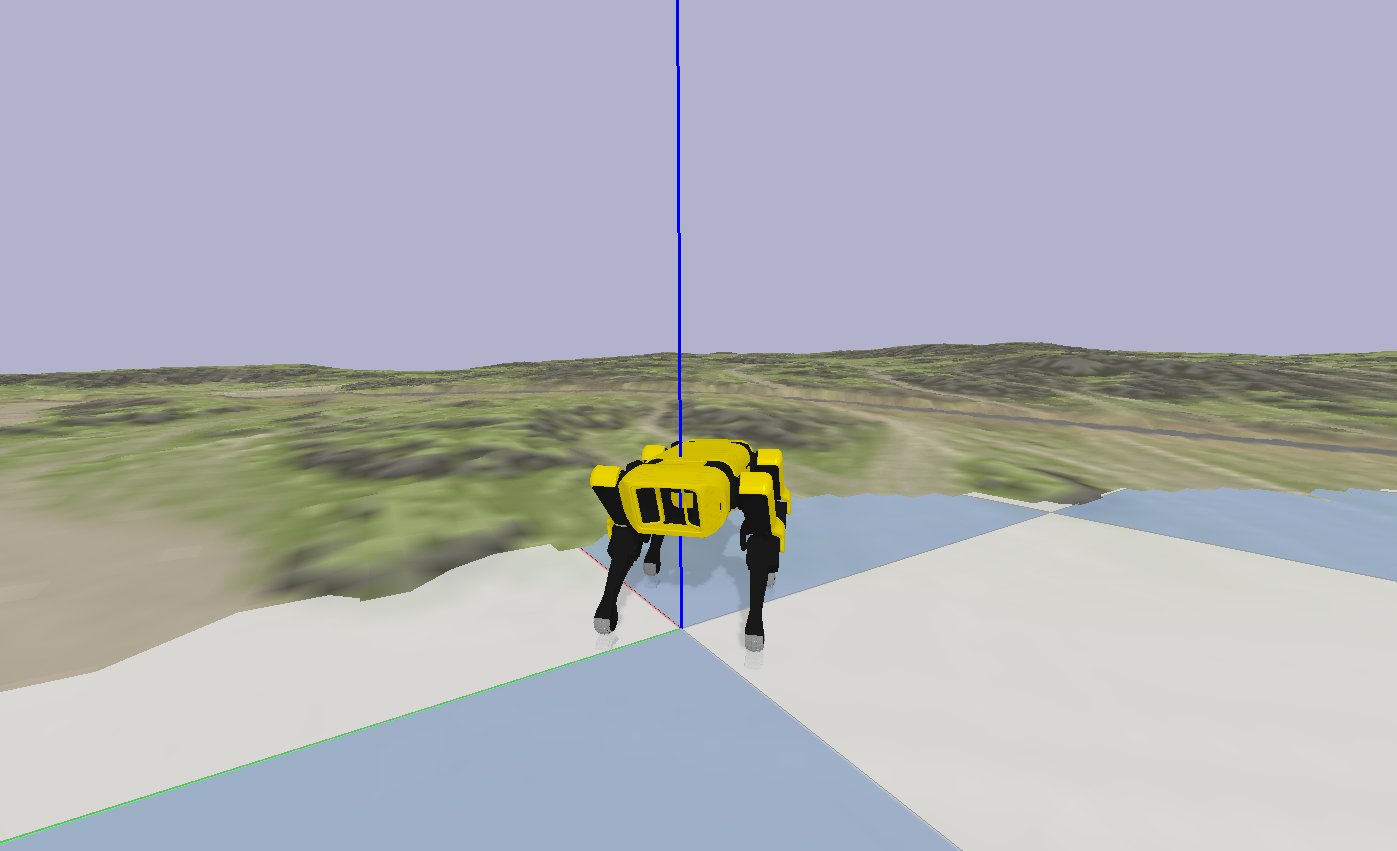 PyBullet
PyBullet
Or, for more control, you can choose a programmatically generated heightfield:
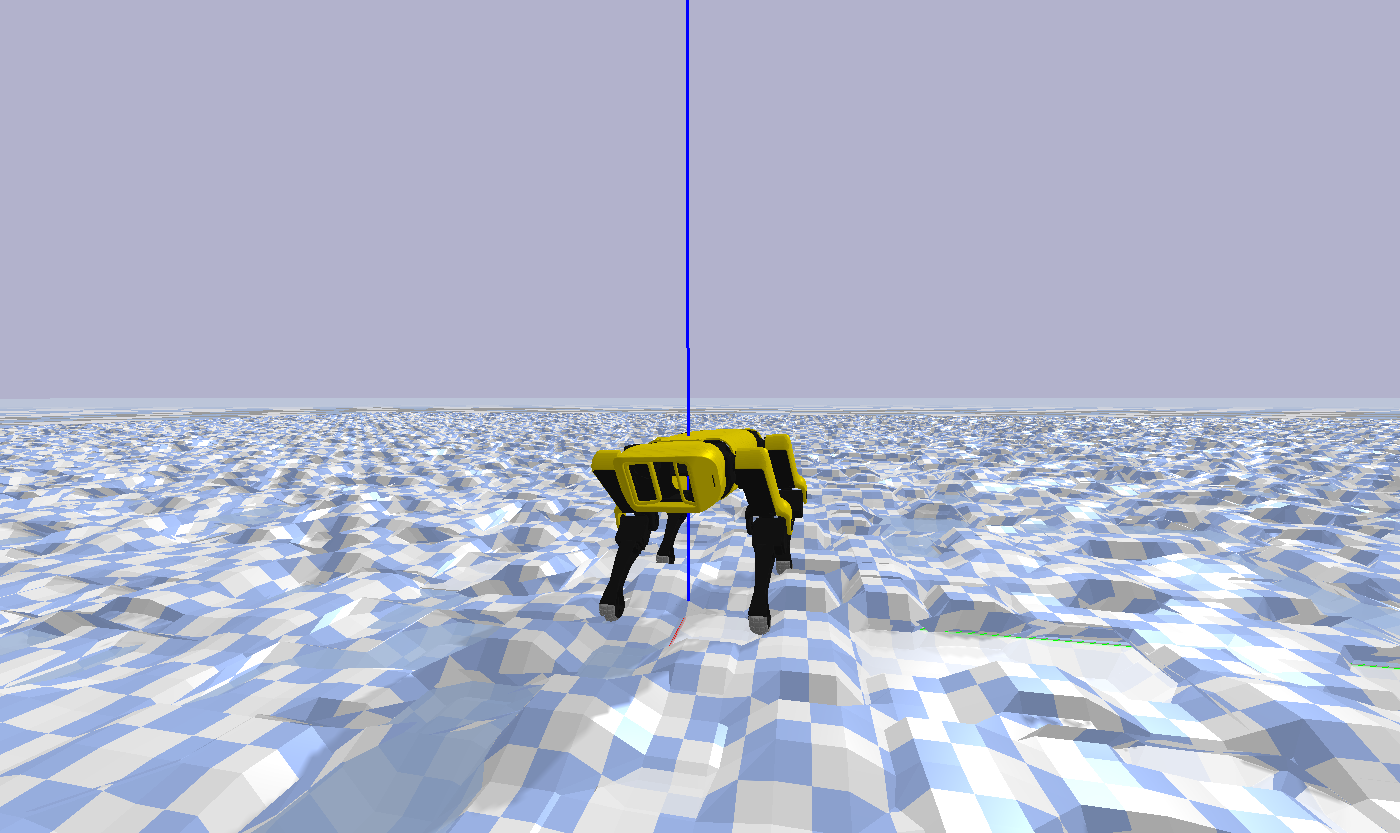 PyBullet
PyBullet
Notice that when the simulation resets, the terrain changes. What you cannot see is that the robot’s link masses and frictions also change under the hood for added training robustness:
 PyBullet
PyBullet
Quickstart Reinforcement Learning¶
pip3 install numpy
pip3 install pybullet
pip3 install gym
cd spot_bullet/src
./spot_ars_eval.py
Optional Arguments
-h, --help show this help message and exit
-hf, --HeightField Use HeightField
-r, --DebugRack Put Spot on an Elevated Rack
-p, --DebugPath Draw Spot's Foot Path
-a, --AgentNum Agent Number To Load